
Assumptions:
-
Perfect mixing: The exit temperature is equal to the temperature of the reactor contents.
-
There is no inlet and outlet flow rate.
-
The density and heat capacity are constant. Thus, their temperature dependence is neglected.
-
Heat losses are negligible.
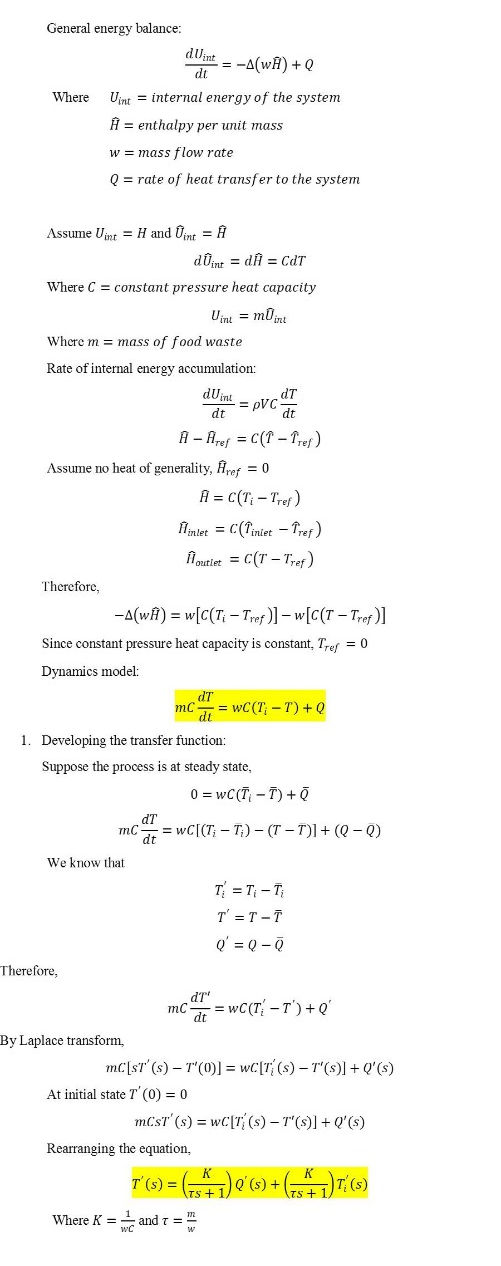
6.1 Transfer function of the reactor
6.0 Control element
6.2 Order of the transfer function
The transfer function is a first order transfer function.
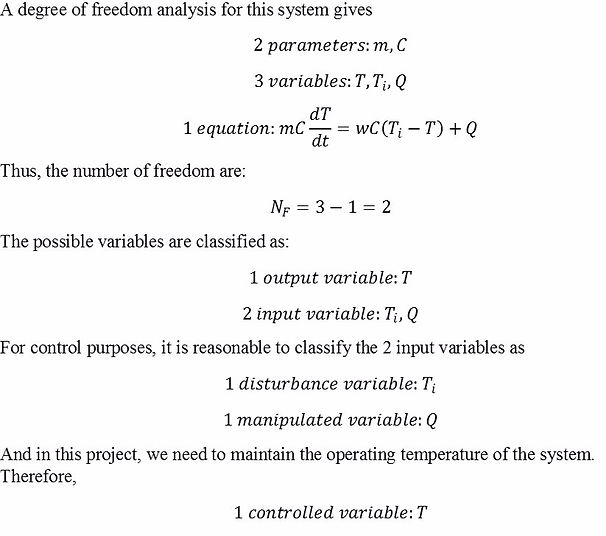
6.2 Control variables, Manipulated variable(s), Disturbance variable(s) for the reactor


6.4 Control Algorithm
The controller we are using is the PID CONTROLLER. This is because we are using a direct heating process in the reactor.
PID controller would be the most suitable and efficient controller compared to the P or PI controller for this reactor as there are no noise problems due to flow streams and it eliminates offset more efficiently.
From the graph, we can see that Proportional controller reduce the offset. When Proportional Integral controller is used, the offset is eliminated but it will produce an ascillatory response. In order to reduce the offset, a combination of Proportional Integral and Derivative Controller is used.